1.本实用新型涉及
一种公用或
智能化技术领域,尤其涉及
一种智能化垃圾箱。
背景技术:2.对于在景区、广场等较大空间工作的垃圾处理人员来说,即时处理装满的
垃圾箱是必不可少的工作。但是通过观察,我们可以发现,市面上现有的
垃圾箱,其设计思想都是针对放置在确定的位置而设计,在实际的工作中,为了游客的方便,管理人员往往会把
垃圾箱分散固定在景区的各个地方,但是游客密集的地方可能并不固定,这就导致了垃圾产生区域的随机性,造成人员密集区域垃圾箱承载量不能满足压力,且在对这些分散的垃圾箱中的垃圾处理时,垃圾处理人员只能逐个的去观察其中是否装满然后再进行处理,
户外广告灯箱,这样做大大加重了工作人员的工作量。本实用新型极大缓解了环卫人员在回收垃圾箱中的垃圾时造成的人力资源浪费问题,有效提高了工作人员的工作效率。
技术实现要素:3.针对现有技术存在的不足,本实用新型的目的在于提供一种智能化垃圾箱,可根据环境压力的不同进行调度,动态解决垃圾处理问题,
广告灯箱,且在到达垃圾处理区域后通过可开合箱底自动倾倒垃圾,本实用新型的定位模块还可在智能垃圾箱出现问题的时候反馈其所在位置,方便工作人员进行定位,及时进行处理。
4.为达到上述技术目的,本实用新型提供的智能化垃圾箱,包括垃圾箱顶棚、顶棚支柱、箱体、可开合箱底、转动动力模块、牵引动力模块、图像采集模块、避障模块、主控模块、rfid模块、供电模块、无线充电模块、显示模块、红外传感模块和定位模块。
5.所述垃圾箱顶棚与所述箱体通过所述顶棚支柱连接,所述图像采集模块通过hdmi线与所述主控模块连接,并安装在所述顶棚外侧,所述箱体由箱身与所述可开合箱底两部分构成,箱身分为内壁和外壁,两壁夹层间布置线路,所述转动动力模块放置在所述可开合箱底下侧,并固定在箱身内壁,通过连接线与主控模块相连,通过旋转轴与所述可开合箱底连接,所述牵引动力模块放置在箱体底端,通过连接线与所述主控模块相连,通过旋转轴与车轮连接,所述供电模块通过type
‑
c接口与所述主控模块接连,置于所述两壁夹层处,所述rfid模块通过usb接口与所述主控模块连接,所述显示模块通过dp接口与所述主控模块连接,并放置在箱身外壁中心上侧,所述避障模块通过连接线与所述主控模块连接,并放置在所述两壁夹层四周中心,所述定位模块通过usb接口与所述主控模块相连,所述红外传感模块通过连接线与所述主控模块连接,并放置在所述箱体内壁垃圾箱口位置,所述无线充电模块通过连接线与所述供电模块连接,并放置在所述箱体底部。
6.进一步地,所述可开合箱底的边缘均采用软橡胶包裹,保证了箱体的密封性。
7.进一步地,所述定位模块采用北斗定位和uwb定位结合的方式,保证了智能垃圾箱的准确定位。
8.进一步地,所述顶棚支柱采用中空设计,所述图像采集模块与所述控制模块连接
线在其中铺设。
9.进一步地,所述可开合箱底采用三角支架结构设计。
10.与现有技术相比,本实用新型的有益效果是:
11.(1)由于设置了rfid模块,每个智能垃圾箱都会被唯一识别,智能垃圾箱的所在区域与到来时间记录之后,将在产生垃圾较多的区域派出更多的智能垃圾箱,动态分配智能垃圾箱所在位置使资源更合理地分配。
12.(2)智能垃圾箱由于设置了牵引动力模块和轮子,在实际的垃圾回收环节,垃圾箱可自主行进至垃圾回收处,避免了垃圾回收车辆造成的拥堵现象。
13.(3)智能垃圾箱由于设置了转动动力模块和可开合箱底,在垃圾倾倒环节,垃圾箱在倾倒区域通过主控模块控制,箱底自动打开倾倒垃圾。
14.(4)由于设置了图像采集模块和定位模块,工作人员可以观察到景区、广场的实时信息,方便处理紧急情况。
15.(5)由于设置了显示模块,可以随时查看温度、天气和时间,方便游客规划行程。
附图说明
16.本实用新型的附图用来提供对本技术的进一步理解,构成本技术的一部分,在附图中:
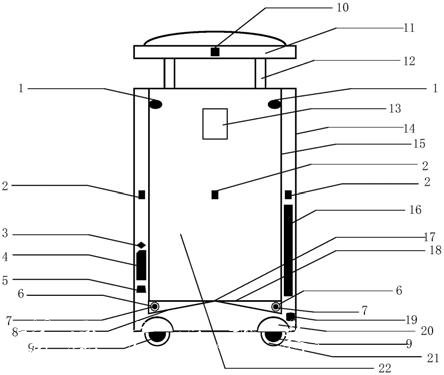
17.图1是本发明的外观主视图。
18.图2是本发明的各个模块连接图
19.图中标号表示为:1
‑
红外传感模块,2
‑
避障模块,3
‑
定位模块,4
‑
主控模块,5
‑
rfid模块,6
‑
转动动力模块,7
‑
旋转轴,8
‑
三角支架,9
‑
牵引动力模块,10
‑
图像采集模块,11
‑
顶棚,12
‑
顶棚支柱,13
‑
显示模块,14
‑
箱身外壁,
候车亭,15
‑
箱身内壁,16
‑
供电模块,17
‑
软橡胶,18
‑
可开合箱底,19
‑
无线充电模块,20
‑
车轮保护外壳,21
‑
车轮,
户外滚动灯箱,22
‑
箱体。
具体实施方式
20.为使本技术的目的、技术方案和优点更加清楚,以下结合附图及具体实施例,对本技术作进一步的详细说明。
21.图1是本发明的外观主视图,包括:1
‑
红外传感模块,2
‑
避障模块,3
‑
定位模块,4
‑
主控模块,5
‑
rfid模块,6
‑
转动动力模块,7
‑
旋转轴,8
‑
三角支架,9
‑
牵引动力模块,10
‑
图像采集模块,11
‑
顶棚,12
‑
顶棚支柱,13
‑
显示模块,14
‑
箱身外壁,15
‑
箱身内壁,16
‑
供电模块,17
‑
软橡胶,18
‑
可开合箱底,19
‑
无线充电模块,20
‑
车轮保护外壳,21
‑
车轮,22
‑
箱体。图2是本发明的各个模块连接图。
22.如图1中,箱体由箱身和箱底两部分组成。箱身又分为内外两层,内层盛放垃圾,两层之间布置线路。
23.具体的,箱体底部四个车轮上部,均由凸起状外壁保护。
24.具体的,牵引动力模块具体可采用伺服电机,一端与供电模块连接,一端与主控模块连接,一端与车轮连接,小型电机不仅为车轮提供动力,而且通过控制前进方向车轮两个电机的不同转速达到转弯的目的。
25.如图1中,主控模块与图像采集模块通过hdmi连接线连接,主控模块与供电模块通
过vga连接线连接,主控模块与rfid模块通过usb连接线连接,
路牌,主控模块与显示模块通过dp连接线连接,主控模块与避障模块通过type
‑
c连接线连接,主控模块与定位模块通过usb连接线连接,主控模块与红外传感模块通过micro连接线连接。
26.具体的,红外传感模块采用红外线发光二极管与光敏接收管的方式来判断垃圾是否装满。
27.具体的,避障模块在到达景区、广场的预设地点或者充电时关闭功能,方便游客或工作人员靠近。
28.具体的,主控模块是可以控制整个系统的中心,集成了整个电路系统的逻辑功能。
29.具体的,图像采集模块具体的可以采用针形摄像头,安装在箱体顶棚外侧,用来观察景区、广场的实时信息。
30.具体的,箱体外壁部分采用js防水涂料防止潮湿环境对箱体的腐蚀。
31.具体的,箱体顶棚采取中心外凸、边沿水平的设计,可以有效地防止雨水聚集。
32.具体的,避障模块采取超声波测距传感器避障,通过测得与障碍物的距离来规避障碍。
33.具体的,定位模块采取北斗定位系统和uwb定位结合的方式,定位系统包括但不限于北斗定位系统,还应包含gps定位系统、格洛纳斯定位系统和伽利略卫星定位系统。
34.具体的,显示模块和主控模块的连接方式包括但不限于有线连接,还应包含无线蓝牙连接。
35.具体的,可开合箱底设计有直角三角形支架结构,内壁一侧为直角端和不小于60
°
的锐角端,两角夹边小于内外壁夹层距离。
36.本实施例叙述的较为具体和详细,也给出了实施例的一些优选措施,但是,该实施例和优选措施并不能作为对本实用新型的限制,本领域的技术人员看到该方案时,做出的其他变形和等同手段的替换,均应在本实用新型的保护范围之内。


